principles-of-detection-network-design
对于一个深度学习问题, 我们应该尽量从模型、数据、算法三个方向进行处理。对于目标检测也不例外。 这里,我们将从模型、数据和算法三个角度对目标检测这个问题进行展开探讨。 由于很多问题都是行业内有待讨论,值得商榷的, 所以一些观点也会附上链接, 并挑选出笔者认为合适的方案。
一. 模型部分:
一个典型的目标检测的前向推理流程为:
输入图像 → 提取特征 → 特征融合 → 解析为 bbox → nms → result
目标检测训练的典型流程为:
输入图像 → 提取特征→ 特征融合 → 解析为 bbox → bbox 匹配 → 计算 loss 并反向传播
在此以 YOLOv3 为例, 来探讨一下检测模型的几个核心部分:
- 网络主体框架:包括特征提取 backbone、特征融合 neck、特征输出 head
- nms
- loss 损失
1. 网络主体框架
一般分为三个部分: backbone、neck、head
(1)backbone:常见的 backbone 设计方案有
- 基础网络:VGG16、Resnet50、CSPReNeXt50、resnet50-vd
- Efficientnet、HRNet、SpineNet
- 轻量级网络:shufflenet、mobilenet、ghostnet
一些特殊结构: DCN、CoordConv、swish 或 mish 激活函数、Attention module(空间或者通道)、transformer 结构
(2) neck
addition-aggregation:SPP 模块、ASPP 模块、RFB 模块和 SAM 模块
Path-aggregation:FPN、PANet、NAS-FPN、 FC-FPN、BiFPN、ASFF、 SFAM
(3) head
主要是用于输出结果,一般为常见的卷积层
- Dense Prediction(one-stage):
- RPN、SSD/YOLO、RetinaNet(anchor based)
- CornerNet、CenterNet、MatrixNet、FCOS(anchor free)
Sparse Prediction(two stage)
- Faster RCNN、F-FCN、Mask R-CNN(anchor based)
- RepPoints(anchor free)
单个 Anchor 分配多个标签
其他:更好的预训练模型
2. nms 设计
nms 设计要点在于判定两个 bbox 的 IoU。常见的 IoU 如下所示:
2.1 IoU
IoU就是我们所说的交并比,是目标检测中最常用的指标。 他的作用不仅用来确定正样本和负样本,还可以用来评价输出框 (predict box) 和 ground-truth 的距离。
其拥有几个特性:
- 尺度不变形, 也就是说对尺度不敏感(scale invariant)。
- 度量的三要素:非负性、对称性、三角不等式。
IoU 存在的问题:
- 如果两个框没有相交,根据定义,IoU=0,不能反映两者的距离大小( 重合度 )。同时因为 loss=0,没有梯度回传,无法进行学习训练。
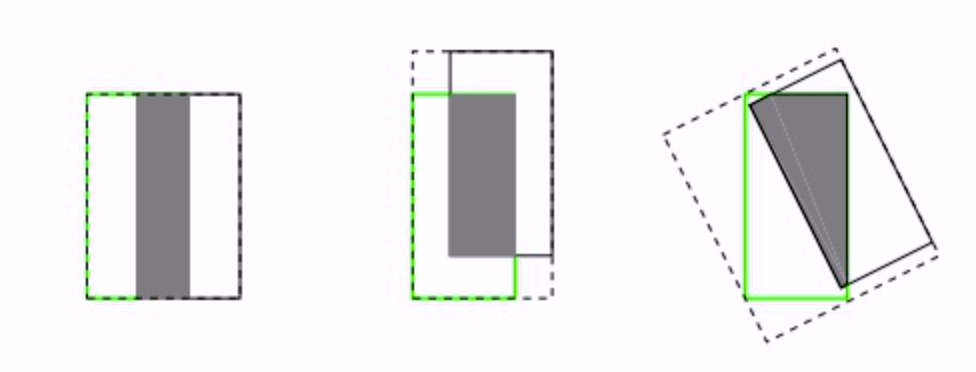
- IoU 无法精确的反映两者的重合度大小。如下图所示,三种情况IoU都相等,但看得出来他们的重合度是不一样的,左边的图回归的效果最好,右边的最差。
代码实现如下:
def IoU(box1, box2):
""" box1, box2: top, left, bottom, right """
area1 = (box1[2] - box1[0]) * (box1[3] - box1[1])
area2 = (box2[2] - box2[0]) * (box2[3] - box2[1])
in_h = min(box1[2], box2[2]) - max(box1[0], box2[0])
in_w = min(box1[3], box2[3]) - max(box1[1], box2[1])
inter = 0 if (in_h < 0 or in_w < 0) else in_h * in_w
return inter / (area1 + area2 - inter)2.2 GIoU
论文地址: https://arxiv.org/pdf/1902.09630.pdf
GIoU(Generalized Intersection over Union)相较于 IoU 多了一个 ‘Generalized’,这也意味着它能在更广义的层面上计算IoU,并解决刚才我们说的 ‘两个图像没有相交时,无法比较两个图像的距离远近’ 的问题。
GIoU 的计算公式为:
其中 $A^c$ 代表两个图像的最小包络面积,也可以理解为这两个图像的最小外接矩形的面积。由此我们可以看出:
- 原有 IoU 取值区间为 [0,1],而 GIoU 的取值区间为 [-1,1];在两个图像完全重叠时,IoU = GIoU = 1,在两个图像距离无限远时,IoU = 0 而 GIoU = -1。
- 与IoU只关注重叠区域不同,GIoU不仅关注重叠区域,还关注非重叠区域,这样能更好的的反映两个图像的重合度。其完善了图像的重叠度的计算功能。
代码实现如下:
def GIoU(box1, box2):
""" box1, box2: top, left, bottom, right """
area1 = (box1[2] - box1[0]) * (box1[3] - box1[1])
area2 = (box2[2] - box2[0]) * (box2[3] - box2[1])
in_h = min(box1[2], box2[2]) - max(box1[0], box2[0])
in_w = min(box1[3], box2[3]) - max(box1[1], box2[1])
inter = 0 if (in_h < 0 or in_w < 0) else in_h * in_w
union = area1 + area2 - inter
iou = inter / union
area_C = ((max(box1[1], box1[3], box2[1], box2[3]) - min(box1[1], box1[3], box2[1], box2[3])) *
(max(box1[0], box1[2], box2[0], box2[2]) - min(box1[1], box1[3], box2[1], box2[3])))
return iou - (area_C - union) / area_C2.3 DIoU
参考论文:Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression
GIoU 虽然解决了 IoU 的一些问题(这里主要是重叠度的问题),但是它并不能直接反映预测框与目标框之间的距离,比如当目标框完全包裹预测框的时候,IoU 和 GIoU 的值都一样,此时 GIoU 退化为IoU, 无法区分其相对位置关系。
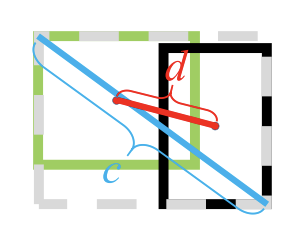
DIoU(Distance-IoU)即可解决这个问题,它将两个框之间的重叠度、距离、尺度都考虑了进来,DIoU的计算公式如下:
其中 $b$,$b^{gt}$ 分别代表两个框的中心点, $rho$ 代表两个中心点之间的欧氏距离,$c$ 代表最小包络矩形的对角线,即如下图所示:
DIoU 相较于其他两种计算方法的优点是:
- DIoU 可直接最小化两个框之间的距离,所以作为损失函数的时候 loss 收敛的更快;
- 在两个框完全上下排列或左右排列时,没有空白区域,此时 GIoU 几乎退化为了 IoU,但是 DIoU 仍然有效。
我们可以认为,DIoU 在完善图像重叠度的计算功能的基础上,实现了对图形距离的考量,但仍无法对图形长宽比的相似性进行很好的表示。
代码实现如下:
def DIoU(box1, box2):
""" box1, box2: top, left, bottom, right """
C_2 = ((max(box1[1], box1[3], box2[1], box2[3]) - min(box1[1], box1[3], box2[1], box2[3])) ** 2 +
(max(box1[0], box1[2], box2[0], box2[2]) - min(box1[1], box1[3], box2[1], box2[3])) ** 2)
D_2 = (((box2[1]+box2[3])/2 - (box1[1]+box1[3])/2)**2 +
((box2[0]+box2[2])/2 - (box1[0]+box1[2])/2)**2)
iou = IoU(box1, box2)
return iou - D_2 / C_22. 4 CIoU
CIoU 的全称为 Complete IoU,它在 DIoU 的基础上,还能同时考虑两个矩形的长宽比,也就是形状的相似性,CIoU 的计算公式为:
其中 $\alpha$ 是权重参数,而 $v$ 用来度量长宽比的相似性:
可以看出,CIoU 就是在 DIoU 的基础上,增加了图像相似性(长宽比)的影响因子,因此可以更好的反映两个框之间的差异性。
代码实现如下:
import math
def CIoU(box1, box2):
""" box1, box2: top, left, bottom, right """
iou = IoU(box1, box2)
diou = DIoU(box1, box2)
v = 4 / math.pi**2 * (math.atan((box2[3] - box2[1])/(box2[2] - box2[0]))
- math.atan((box1[3] - box1[1])/(box1[2] - box1[0])))**2 + 1e-5
alpha = v / ((1-iou) + v)
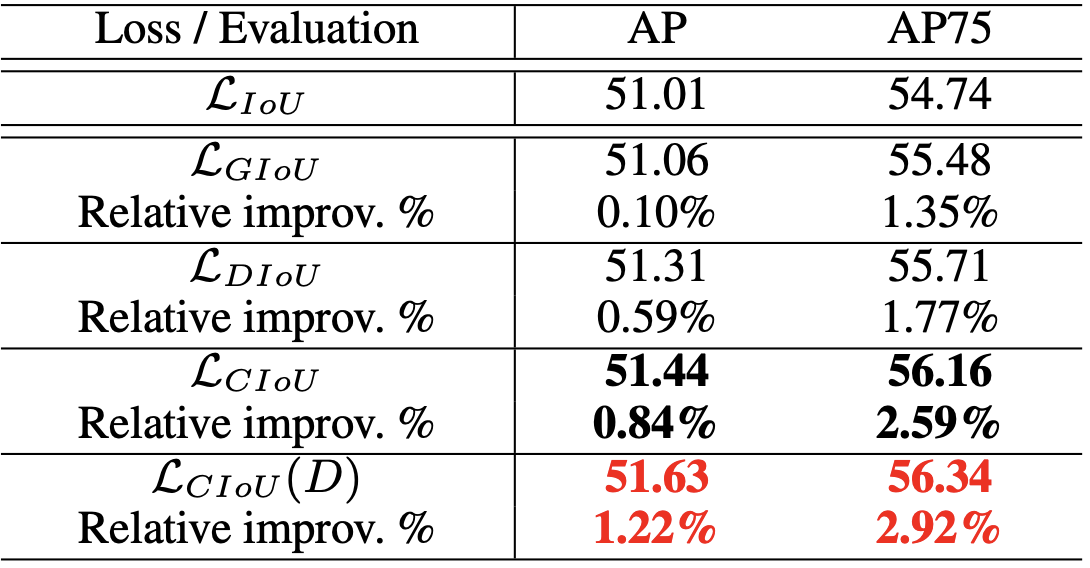
return diou - alpha * v如下图所示, 是以不同的 IoU 作为损失函数, 在 Pascal VOC 验证集上的增益:
2.5 Matrix nms
3. loss 设计
目标检测中的损失函数 loss 可以分为两类: 第一类是分类损失, 第二类是检测回归损失。
常见的分类损失有: cross entropy、 focal loss、GHM loss、AP loss 和 DR loss 等等
常见的回归损失有:
- l1、l2、smooth l1
- IOU loss
- 其他本文未展开 loss: softer nms 的 KL loss、 GHM-R loss、IoU-bounded loss、 huber loss 的概率解释新 loss, libra RCNN 的 balanced l1 loss
3.1 分类损失
3. 1.1 cross entropy 交叉熵损失
交叉熵损失是我们再计算分类损失的时候最常用的损失函数, 其公式如下:
单阶段的目标检测器通常会产生高达 100k 的候选目标, 只有极少数是正样本, 正负样本数量非常不平衡。 为了解决正负样本不平衡的问题, 我们通常会在交叉熵损失的前面加上一个参数 $\alpha$, 即:
3.1. 2 focal Loss
focal loss 的引入主要是为了解决难以样本数量不平衡(注意, 有区别于正负样本数量不平衡)的问题。在目标检测算法中,添加权重 $\alpha$ 平衡了正负样本的数量, 但是对于难易样本的不平衡并无助益。 实际上,易分样本对模型的提升效果非常小, 模型应该主要关注那些难分对象。 (这个观点有问题, 是 GHM 的主要改进对象)。 focal loss 的提出主要是为了解决难易样本数量的不平衡问题。其思路很简单: 把高置信度 $p$ 样本的损失降低一些即可:
举个例子, $\gamma $ 取 2, p 取 0.968 的时候, $(1-0.968)^2$ 约定于 0.001, 损失衰减了 1000 倍。 focal loss 的最终形式结合了正负样本的权重 $\alpha$ 和 难易样本的权重 $(1-p)^\gamma$。 同时解决了正负样本的不均衡和难易样本的不均衡问题。 最终的 focal loss 形式如下:
实验证明, 当 $\gamma$ 取 2, $\alpha$ 取 0.25 的时候效果最佳。
3.1.3 GHM
focal loss 存在两个问题: (1) 让模型过多的关注那些难分样本是存在问题的。 比如样本中有离群点, 那么模型已经收敛的模型还要去关注这些样本。 (2) 公式中的 $\alpha$ 和 $\gamma$ 的取值需要凭借试验得出, 且 $\alpha$ 和 $\beta$ 要联合起来一起试验才行。 GHM(gradient harmonizing mechaism) 解决了上述两个问题。
文章首先定义了一个梯度模长 g:
其中 $p$ 是模型预测的概率, $p^$ 是 ground-truth 的标签, $p^$ 的取值为 0 或 1。
g 正比于检测的难易程度, g 越大则检测难度越大。 注意到梯度模长和样本数量的关系如下图所示:
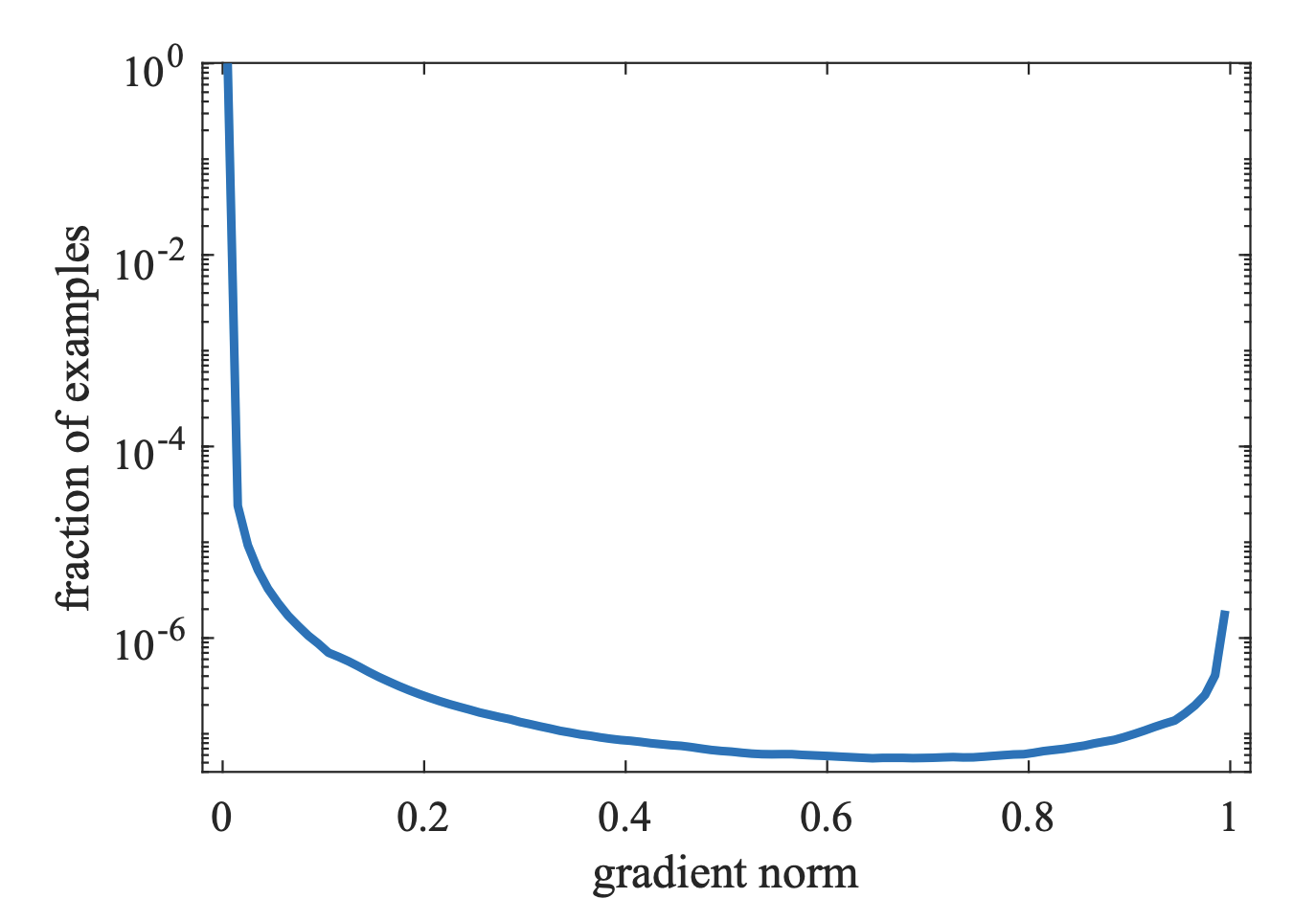
可以看到, 梯度模长接近于 0 的样本数量最多, 随着梯度模长的增长, 样本数量迅速减少, 但是在梯度模长接近于1 时, 样本数量也挺多。 GHM 的想法是, 我们确实应该如 focal loss 所说的不应该过分关系易分样本,但是特别难分的样本(outliers, 离群点) 也不该关注。所以作者认为应该同时衰减易分样本和难分样本, 区分的方法是定义了梯度密度 $GD(g)$ 这个变量, 来衡量出一定梯度范围内的样本数量。
其中 $\delta\epsilon(g_k, g)$ 表明了样本 1- N 中, 梯度模长分布在 $(g-\frac{\epsilon}{2}, g+\frac{\epsilon}{2})$ 范围内的样本个数, $l\epsilon(g)$ 代表了 $(g-\frac{\epsilon}{2}, g+\frac{\epsilon}{2})$ 区间的长度。梯度密度的含义是:单位梯度模长 g 部分的样本个数。所谓的 GHM 损失 $l_{GHM-C}$ 就是 交叉熵CE 除以该样本的梯度密度即可。
其实不同的损失函数都是对不同的样本赋予不同的权重, CE 中添加 $\alpha$ 是为了抑制负样本; focal loss 添加 $(1-p)^\gamma$ 则是用来抑制简单样本,而 GHM 则用来同时抑制简单样本和较困难样本。
3. 2. 回归损失
3. 2. 1 L2, L1, smooth L1
smooth L1 loss 相对于 l2 loss 的优点: 当预测框与 ground truth 差别过大时,梯度值不至于过大;当预测框与 ground truth 差别很小时,梯度值足够小。
3.2.2 IoU loss
首次将 IoU 的概念引入 loss 损失函数由旷视提出, 发表于 UnitBox: An Advanced Object Detection Network。 论文指出,通过 4 个点回归坐标框的方式是假设4个坐标点是相互独立的,没有考虑其相关性,实际 4 个坐标点具有一定的相关性。其中 $IoU_{loss} = 1 - IoU + 修正项$。其中, IoU 可以是 IoU, GIoU, DIoU 和 CIoU。
3.2.3 IOU Aware
3.2.4 Grid Sensitive
二. 数据增强技术(含标签增强)
常见的数据增强方式可以分为四种: 几何变换、光学变换、增强噪声、数据源扩充。
几何变换:可以丰富物体在图像中出现的位置和尺度等, 从而满足模型的平移不变性与尺度不变性。例如平移, 翻转、翻转、缩放和裁剪等操作。尤其是水平翻转 180度, 在多个物体检测算法中都有使用, 效果很好。
光学变化:可以增加不同光照和场景下的图像, 典型的操作有亮度、对比度、色相与饱和度的随机扰动、通道色域之间的交换等。
增加噪声: 通过在原始图像上增加一定的扰动, 如高斯噪声。稍微复杂一点的就是在面积大小可选定、位置随机的矩形区域上丢弃像素产生黑色矩形块。 增加噪声可以使模型对可能遇到的噪声等自然扰动产生鲁棒性, 从而提升模型的泛化能力。 需要注意噪声不能过大, 以免影响模型的输出。上面的几何变换类操作,没有改变图像本身的内容,它可能是选择了图像的一部分或者对像素进行了重分布。如果要改变图像本身的内容,就属于颜色变换类的数据增强了,常见的包括噪声、模糊、颜色变换、擦除、填充等等。
- 数据源头: 有时为了扩充数据集, 可以将检测物体与其他背景图像融合,通过替换物体背景的方式来增加数据集的丰富性。 比如比较时髦的 CutOut、Mixup、CutMix、Mosaic、label-smoothing 等方案。
一些比较有用的数据增强方案的代码解析
dataset
- data-aug:
YOLOv4: CutMix、Mosaic (马赛克) 、Self Adversarial Training, SAT、Label Smoothing
PPYolo: DropBlock
freebies: Image Mixup、Label Smoothing
mixup
big batchsize
random shapes training
解决数据不平衡问题
freebies:Data Preprocessing
三. 算法优化
1. 学习率 done
>>> scheduler = ...
>>> for epoch in range(100):
>>> train(...)
>>> validate(...)
>>> scheduler.step()常见的几种学习率的调整方法: ReduceLROnPlateau、余弦退火、StepLR
ReduceLROnPlateau:当指定指标不下降(上升)的时候, 将学习率降低为原来的十分之一。是这三种方案里面最优的, 他可以根据训练的情况进行动态调整, 需要注意的是, 用的时候最好设置一下最小学习率,不然后期会因为学习率衰减得过小导致模型不再训练。
torch.optim.lr_scheduler.ReduceLROnPlateau(optimizer, mode='min', factor=0.1, patience=10, threshold=0.0001, threshold_mode='rel', cooldown=0, min_lr=0, eps=1e-08, verbose=False)余弦退火使用的时候,最大学习率和最小学习率相差的数量级不要太大(比如1e-1和1e-4),不然会导致在该快的时候太慢,该慢的时候太快,特别的接近最优解的时候,太大就直接跑偏
torch.optim.lr_scheduler.CosineAnnealingLR(optimizer, T_max, eta_min=0, last_epoch=-1, verbose=False)StepLR 传统,也挺好用的,但是灵活度不如 ReduceLROnPlateau
torch.optim.lr_scheduler.StepLR(optimizer, step_size, gamma=0.1, last_epoch=-1, verbose=False)
warmup:warmup 是在 resnet 论文中提到的一种学习率预热的方法,它在训练开始的时候先选择使用一个较小的学习率,训练了一些 epoches 或者 steps (比如 4 个epoches, 10000steps), 再修改为预先设置的学习来进行训练。由于刚开始训练时,模型的权重(weights)是随机初始化的,此时若选择一个较大的学习率,可能带来模型的不稳定(振荡),选择 Warmup 预热学习率的方式,可以使得开始训练的几个 epoches 或者一些 steps 内学习率较小,在预热的小学习率下,模型可以慢慢趋于稳定,等模型相对稳定后再选择预先设置的学习率进行训练,使得模型收敛速度变得更快,模型效果更佳
torch.optim.lr_scheduler.CosineAnnealingWarmRestarts(optimizer, T_0, T_mult=1, eta_min=0, last_epoch=-1, verbose=False) 通常当我们增加 batchsize 为原来的 n 倍时,要保证经过同样的样本后更新的权重相等,按照线性缩放规则,学习率应该增加为原来的 n 倍[5]。但是如果要保证权重的方差不变,则学习率应该增加为原来的 sqrt(n) 倍[7],目前这两种策略都被研究过,使用前者的明显居多。
2. 优化器 done
SGD with momentum 和 Adam variants 是最通用、最基本的选择。 计算机视觉任务优先使用前者, NLP 优先使用后者。原因是自适应优化器 adam 更容易找到 sharp minima, 泛化性能常常比 SGD 差。
torch.optim.Adam(params, lr=0.001, betas=(0.9, 0.999), eps=1e-08, weight_decay=0, amsgrad=False)torch.optim.SGD(params, lr=<required parameter>, momentum=0, dampening=0, weight_decay=0, nesterov=False)3. 归一化
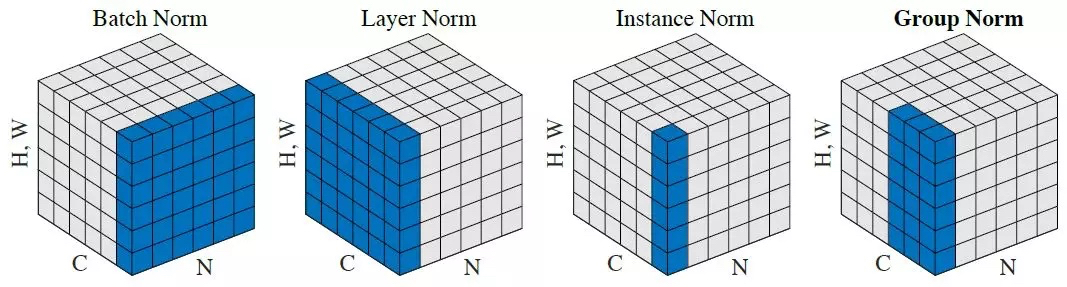
常见的归一化方式如下图所示,其中 N 是 batch size, C 表示的是 channel, H 和 W 表示单张图片的宽度和高度, 蓝色区域的部分就是需要归一化的部分。
归一化步骤
计算归一化部分的均值 $\mu$,方差 $\sigma^2$ , 进行归一化 $x’ = \frac{x-\mu}{\sqrt{\sigma^2 + t}}$
加入缩放和平移变量 $\gamma$ 和 $\beta$, 归一化后的值 $y = \gamma x’ + \beta$
四个 Normalization 适用于不同的模型。 其中 Batch Normalization:适用于判别模型,比如图片分类。Instance Normalization 适用于生成模型,比如图片分割、迁移。Group Normalization 则是为了解决 Batch Normalization 对较小的 mini-batch 效果差的问题。 Layer Normlization 多用于 NLP 任务比如 RNN 和 Transformer。
? ? ? ? ? BN: CmBN/SyncBN
4. 初始化
网络参数初始化的优劣在极大程度上决定了网络的最终性能。网络参数初始化方式主要有以下几种:
- 全零初始化:全零初始化会导致神经元的输出相同,相同的输出导致梯度更新完全一样,这样便会令更新后的参数仍然保持一样的状态,从而无法对模型进行训练。
- 随机初始化:将参数值随机设定为接近0的一个很小的随机数(有正有负)。比如使用高斯分布或者均匀分布。比较推荐的模型包括: Xavier 初始化方式和 Kaiming 初始化方式。
- 预训练模型初始化
- 数据敏感的参数初始化方式 https://github.com/philkr/magic_init
5. 参数更新方案
遗传算法选择超参数
参数更新上使用滑动平均
四. 其他
1. 编写代码的基本流程
- 构建网络, 输入随机 Tensor, 检查输入和输出是否正确。
- 构建数据集读取接口, 查看是否能够准确的读取数据、可视化,并检测数据
- 编写损失函数、评价指标,优化方法
- 组合优化、数据和网络
2. 网络设计的考虑点
- 现有精度能否得到需求的指标
- 运算资源是否足够
五. 常见问题
1. 多尺度问题
我们总结了 6 种 有效解决多尺度问题的方案, 其中前四种是比较通用的提升多尺度检测的经典方法
(1) 降低下采样率和使用空洞卷积可以显著提高小物体的检测性能: 对于小物体检测而言, 降低网络的下采样率是最为简单的提升方式, 通常的做法是直接去掉 pooling 层。 如果仅仅去掉 pooling 层, 则后序层的感受野会较小, 由于后序层的感受野和预训练模型对应层的感受野不同, 从而会导致不能很好的收敛, 一个比较常见的做法是去掉 pooling 层后,将后序的一个 3x3 卷积变为 空洞数为 2 的卷积, 可以达到有效的降低下采样的目的。
(2) 设计更好的 anchor 可以有效提升 proposal 的质量:由于不同的数据集合任务中, 由于物体的尺度、大小会有所差异, 与通用的标签会有所区别, 这时需要调整 anchor 的大小和宽高。 一个比较经典的做法是 yolo 采用的 anchor 聚类算法。
(3)多尺度训练(MST, Multi Scale Training, MST)可以近似构建出图像金字塔, 增加样本的多样性:通常是指设置几种不同的图片输入尺度, 训练时从多个尺度中随机选取一种尺度, 将输入图片缩放到该尺度并送入网络中。 在测试中, 为了得到精准的检测效果,可以将测试图片的尺度放大, 例如放大 4 倍。 这样可以避免小物体的漏检。
(4) 特征融合可以构建出特征金字塔, 将浅层与深层特征优势互补:随着网络层数的增加, 感受野会增大,语义信息也更为丰富, 但是对于小物体, 其特征会随着层数的加深而逐渐丢失, 从而导致检测性能的降低。 将深浅层特征进行融合,可以实现底层特征和高层语义信息的融合。 常见的做法有: FPN的特征金字塔、 DetNet 的空洞卷积与残差、HyperNet 的反卷积与通道拼接、DSSD 的反卷积与特征相乘、RefineDet 的反卷积与逐元素相加, YOLOv3 的上采样与通道拼接。
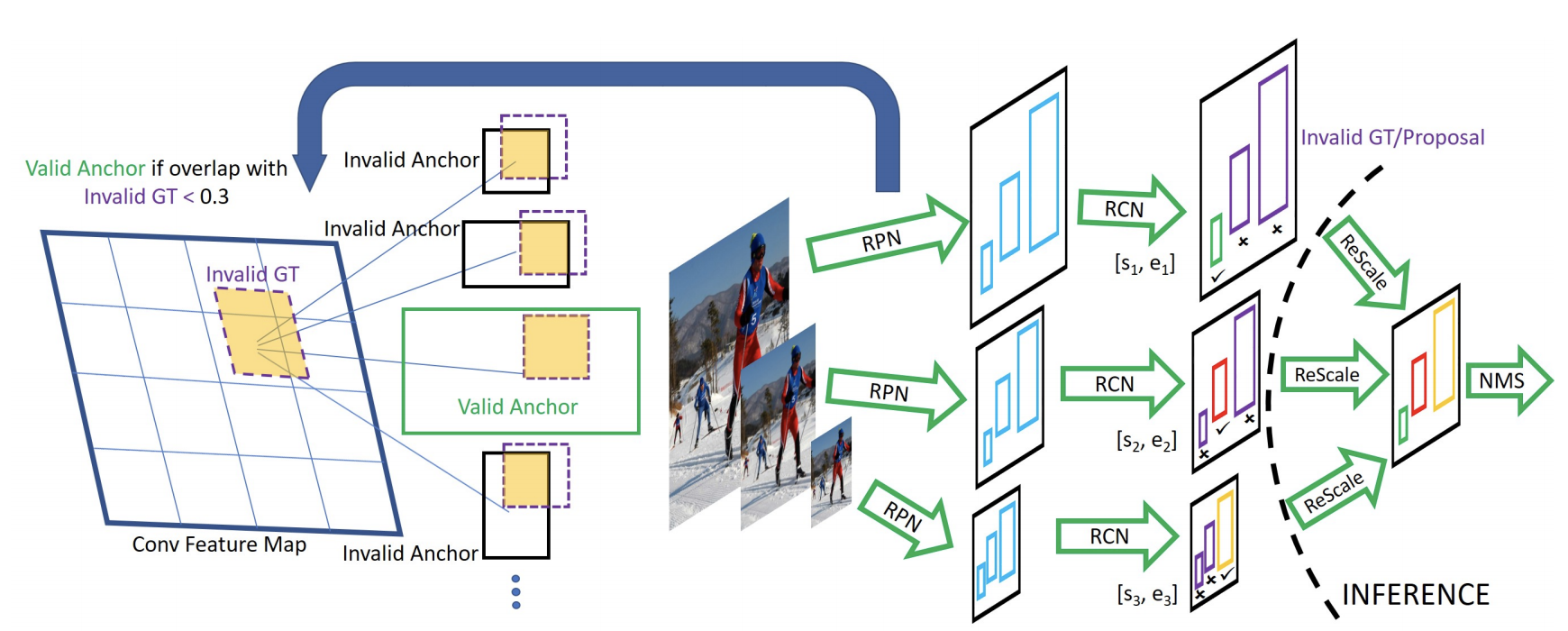
(5) SNIP: SNIP 使用了累死 MST 的多尺度训练方法, 构建了 3 个 尺度的图像金字塔, 3 个尺度分别拥有各自的 RPN 模块, 各自预测指定范围内的物体。但是在训练时, 只对指定范围的 proposal 进行反向传播。
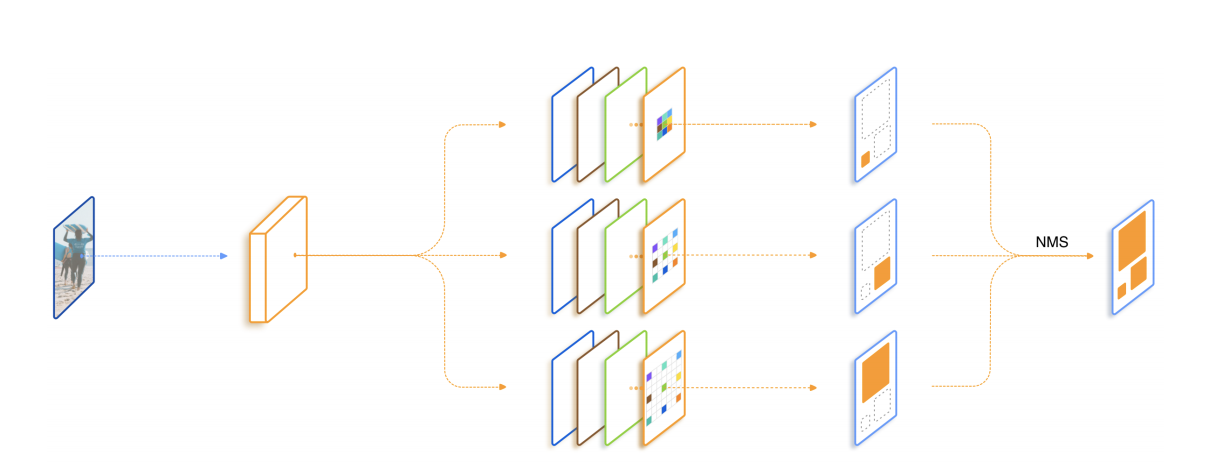
(6) TridentNet:提出了一个拥有三个分支的网络结构, 3个不同的分支使用了空洞数不同的空洞卷积, 感受野由大到小, 更好的覆盖了多尺度的物体分布。 三个分支检测的内容是相同的, 要学习的特征也相同, 不过是形成不同的感受野来检测不同尺度的物体, 借鉴了 SNIP 的思想, 每一个分支只训练一定范围内的样本。
2. 拥挤和遮挡物体检测
(1) 改进 nms: 由于 nms 对遮挡检测影响较大, 因此改进 nms 是一个思路。 比如使用 soft nms 和 IoU-Net 等方法都能在一定程度上提升检测的性能。
(2) 增加语义信息: 遮挡会造成部分信息的缺失, 因此可以尝试引入额外的特征, 如分割信息、梯度和边缘信息等。如 CVPR 2017 的论文 HyperLearner。
(3) 划分多个 part 处理:比如行人之间的形状较为类似, 因此可以利用这个先验信息, 将行人按照不同部位, 如头部、上身、手臂等划分为多个 part 进行单独处理, 然后再综合考虑。
(4) repulsion los: CVPR 2018 的 Repulsion Loss 方法从损失函数的角度出发, 引入了新颖的排斥损失。
(5) OR-CNN: ECCV 2018 的 ORCNN 设计引入了一种新的损失 Aggregation Loss, 使得多个匹配到同一物体标签的 anchor 尽量地靠近; 在 RoI pooling 处根据行人部位分为了 5 个不同的模块, 提出了 PORoI Pooling 方法。
3. 高效 detection
可以从模型压缩和加速的角度进行考虑:使用轻量级网络、剪枝、量化、蒸馏等方法对主干网络进行简化。
可以从检测框架的角度进行考虑:通过合理的设计 backbone、FPN、head 甚至是重新设计网络结构。
4. 样本不均衡的问题
很多问题, 应该从三个方向进行考虑: 模型(model + loss + nms)、数据、算法
- 一个很直观的方向:修改损失函数, 比如 focal loss 和 OHGM
- 从数据集的角度进行分析:进行数据的重采样、数据的增强、cutmix 操作等
5. 其他的几个问题
- 物体不均衡的问题 & 长尾问题
- 重新思考 nms 和 anchor
- 物体的关系: relation network
- nas
- 实际场景结合:
- 传感器融合
- 实际场景的检测:雾霾、雨天、夜晚
- 其他
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!